Трубные элеваторы




![]()
![]()
Элеваторы
При проведении спуско-подъемных операций необходимо захватывать и удерживать на весу подземное оборудование. Для той цели используются различные захватные приспособления, крепящиеся на крюке. К ним относятся элеваторы и хомуты. Элеваторы различаются по назначению и конструкции. По назначению элеваторы бывают трубные и штанговые, соответственно для труб и штанг.
Потипу захвата и удержания трубные элеваторы разделяются на элеваторы:
— с захватом под муфту;
— с захватом под высадку трубы;
— с захватом за тело трубы (элеватор-спайдер).
для работы с безмуфтовыми трубами, а также в случае, когда контактная нагрузка от веса колонны превышает допустимую.
Конструктивное исполнение элеватора зависит от диаметра захватываемых труб, от способа захватывания, несущей нагрузки и технологии ремонта. Этим объясняется многообразие конструкций трубных элеваторов, применяемых при подъемном ремонте скважин. Для насосно-компрессорных труб применяют втулочные (с одним пиропом) и балочные (с двумя штропами) элеваторы. Первые получили наибольшее распространение в подземном ремонте.
Элеватор относится к наиболее ответственным инструментам спус-ко-подъемных операций, его отказ может привести к травмам и серьезным авариям, ликвидация которых потребует значительных средств.
В элеваторе наиболее ответственным элементом является механизм запирания (затвор), который должен обеспечить надежное закрывание захватного устройства во время спуско-подъемных операций.
К элеваторам предъявляются следующие требования:
— обеспечение надежной работы в условиях сильного загрязнения поверхности трубы нефтью, парафинами и солями, а также при низких температурах;
— стойкость к динамическим нагрузкам от рывков и ударов, возникающих при эксплуатации, например при ловильных работах;
— легкость и удобство в работе;
— отсутствие выступающих частей во избежание задевания при подъеме за элементы талевой системы, одежду оператора и т.д.;
— надежное запирание, предотвращающее самопроизвольное открытие в процессе СПО.
Кроме того, механизм запирания должен:
— обеспечивать надежную работу рукой в рукавице, причем желательно одной рукой, так как при этом увеличивается устойчивость оператора;
— выдерживать большое количество циклов открытия-закрытия;
— быть простым и надежным в работе;
— обеспечивать однозначность положения закрыто-открыто;
— иметь несколько степеней защиты от несанкционированного раскрытия;
— положение механизма запирания должно контролироваться как визуально, так и на слух, по щелчку.
 |
Одноштропные элеваторы
На промыслах в подземном ремонте наибольшее распространение получили одноштропные (втулочные) элеваторы сзахватом под муфту типа, входящие в комплект инструмента для работы с насосно-ком-прессорными трубами. Первыми такими элеваторами были элеваторы ЭГ конструкции Молчанова. В настоящее время выпускаются модернизированные конструкции этих элеваторов.
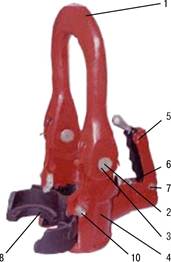
Элеватор ЭТА (рис. 5.2.5)
| Рис. 5.2.5. Элеватор ЭТА |
Одноштропные элеваторы ЭТА с автоматическим захватом предназначаются для захвата и удержания на весу на-сосно-компрессорных труб с гладкими и высаженными концами при механизированном свинчивании и развинчивании труб, а также при ручной работе со спайдером.
Элеватор состоит из корпуса (4), серьги (1), соединенных шарнирно с помощью пальцев (2) и шплинтов (3). В корпусе помещен узел захвата (8), с тыльной стороны которого располагается рукоятка (5), соединенная с корпусом при помощи направляющей втулки (6) и двух штырей (7). Левая и правая направляющие (9), прикрепленные к кор-
Таблица 5.2.1. Технические характеристики элеваторов ЭТА
| Показатели | ЭТА-32 | ЭТА-50 |
| Грузоподъемность, т | ||
| Условный диаметр труб, мм | 48. 73 | 60. 89 |
| Габариты, мм | 265x200x540 | 280x230x575 |
| Масса, кг |
 |
пусу элеватора болтами (10), обеспечивают раскрытие и закрытие челюстей захвата.

Внутренняя полость литого корпуса имеет поверхность под захват для труб.
| Рис.5.2.6. Элеватор двухштропный ЭХЛ |
Захват для труб является сменным узлом, подбираемым в зависимости от диаметра труб.
Автоматический элеватор для бурильных труб
Н А BTQPCHOMV СВИДЕТЕЛЬСТВУ
Il0 ИЗОБРЕТЕНИЯМ И ОТКРЫТИЯМ
1 ( (21) 4349270/23-03 (22) 24. 12 ° 87 (46) 15. 10.89. Бюл. N- 38 (71) Специальное проектно-конструкторское бюро автоматизации глубокого разведочного бурения Всесоюзного производственного объединения «Союзгеотехника» (72) Ф.С.Лыс, Е.И.Молочников и Б.В.Малин (53) 622.242.3(088.8) (56) Авторское свидетельство СССР Р 907217, кл. Е 21 В 19/06, 1980..
Авторское свидетельство СССР
9 1094944, кл. E 21 В 19/06, 1982.
„.SU 1 14901 А1 g 4 Е 21 В 19/06
3. выполненным в виде груза 4 с гибкой тягой (Т) 5, фиксатора 6 груза
4 в нерабочем положении. в виде поворотного поддона (П) 7 с приводом 8 и механизма перемещения 9 груза 4 в нерабочее положение в виде плунжерного гидроцилиндра 10 с гибкой Т 11.
Элеватор снабжен двумя барабанами 12
3 151490 и 13, установленными на корпусе 1 на общей оси 14 и жестко соединенными между собой. Привод 8 П 7 выполнен в виде плунжерного гидроцилиндра 15 с пружиной 16, шарнирно связанных с корпусом 1, Барабан 12 связан с Т 5 груза 4, а барабан t3 — с Т 11 механизма перемещения 9 груза 4 в нерабочее положение, Т 5 и 11 намотаны, на барабанах 12 и 13 в разные сто1
,роны, а П 7 установлен с возможностью, поворота в вертикальной плоскости.
IlpH перемещении элеватора вверх по свече груз 4 находится на П 7. Когда корпус 1 достигнет торца муфты, плунжерный гидроцилиндр 15 поворачивает П 7 и груз 4 соскальзывает с площадки и сматывает Т 5 с барабана
12. При этом Т 11 наматывается на барабан 13. При входе муфты трубы 23 в зону захватного органа 2 упор 2 1 нажимает на конечный выключатель 19 и элеватор захватывает муфту трубы
Изобретение отнбсится к области бурения скважин, а именно к устройствам для спуска-подъемных операций с бурильными трубами. 20
Целью изобретения является упрощение конструкции элеватора.
На фиг. 1 изображен элеватор в исходном положении, общий вид, на фиг, 2 — то же, при захвате трубы после остановки элеватора.
Элеватор содержит корпус 1 с захватным органом 2 и механизмом 3 его управления, выполненным в виде груза
4 с гибкой тягой 5, фиксатора 6 гру- ЗО за 4 в нерабочем положении в виде поворотного поддона 7 с приводом 8 и механизма 9 перемещения груза 4 в нерабочее положение в виде плунжерного гидроцилиндра 10 с гибкой тягой 35
11. Элеватор снабжен двумя барабанами 12 и 13, установленными на корпусе 1 на общей оси 14 и жестко соединенными между собой.
Привод 8 поворотного поддона 7 40 выполнен в виде плунжерного гидро цилиндра 15 с пружиной 16, шарнирно связанных с корпусом 1.
Барабан 12 связан с гибкой тягой
12 и 13 в разные стороны, а поворотный поддон 7 установлен с возможностью поворота в вертикальной плоскости.
Механизм 9 перемещения имеет палиспастную систему в виде блоков роликов 17 и 18 и конечный выключатель
19, а поворотный паддон имеет ролик
На гибкой тяге 5 установлен упор
21, контактирующий с конечным выключатепем 1 9, связанным с системой управления буровой установки (не показана).
Элеватор работает следующим образом.
B цикле спуска бурильной колонны элеватор передает ее штангодержателю (не показан). Одновременно подается на устье скважины следующая свеча и во время ее свинчивания с бурильной колонной (не показано) элеватор с открытым захватом 2 движется вверх по этой свече, при этом груз 4 находится на поворотном поддоне 7 и удерживаетея в этом положении собственным весом (его центр тяжести находится за осью 22 поворота) и пружиной 16 (фиг. 1).
В момент, когда опорная плоскость корпуса 1 элеватора достигает торца муфты верхней трубы 23 свинчиваемой свечи, подается команда на включение предостановочной скорости элеватора и одновременно команда на подачу ра-. бочей жидкости в плунжерный гыдроципиндр 15, плунжер которого поворачи-, вает поворотный поддон 7. а пружина
16 удерживает его в опрокинутом положении. Груз 4 соскальзывает с площадки поворотного поддона 7 и, сматывая гибкую тягу 5 с барабана 12, подает на торец муфты бурильной трубы
23, при этом гибкая тяга 11 наматывается на барабан 13 и через полиспастную систему блоков 17 и 18 утапливает плунжер гидроцилиндра 10, преодолевая давление подпора на сливе этого гидроцилиндра, благодаря чему несколько замедляется скорость падения груза 4. При дальнейшем движении элеватора вверх груз 4 остается на торце муфты трубы 23 и продолжает раскручивать барабаны 12 и 13. При
5 15 входе муфты трубы 23 в зону захвата
2 упор 2 1 (фиг. 2), закрепленный на гибкой тяге 5, нажимает на конечный выключатель 19, от которого в систему управления буровой установки (не показана) посылается сигнал на остановку элеватора и на закрытие захвата 2. Получаем высокую точность остановки элеватора, так как груз 4 и упор 21 проходят одинаковый путь.
После закрытия захвата 2 на муфте бурильной трубы 23 открывается штангодержатель, подается команда на спуск элеватора и одновременно команда на возвращение механизма 3 управления в исходное положение. Для этого соединяют со сливом полость плунжерного гидроцилиндра 15 и подают рабочую жидкость в плунжерный гидроцилиндр 10, плунжер которого опускает блок 18 роликов полиспастной системы,.при этом гибкая тяга 11. раскручивает барабан 13 и сидящий с ним на одной оси 14 барабан 12, гибкая тяга 5 которого наматывается на барабан 12 и поднимает груз 4. В верхнем положении груз 4 упирается в верхнюю площадку поддона 7, а так как вращение барабана 12 и 13 продолжается, то груз 4 опрокидывает. поддон 7 и сам устанавливается в исходное положение, при этом пружина
16 перебрасывается и фиксирует под14901 6 дон 7 в этом положении. Надежность удержания груза 4 в этом положении обеспе п;вается также тем, что его центр тяжести расположен за осью 22
25 выполнен в виде плунжерного гидроцилиндра с пружиной, шарнирно связанных с корпусом, причем один барабан связан с гибкой тягой груза, а другой— с гибкой тягой механизма перемещения груза в нерабочее положение, при этом гибкие тяги намотаны на, барабанах в разные стороны, а поворотный поддон установлен с возможностью поворота в вертикальной плоскости.
ДЛЯ ЗАХВАТА ТРУБ ДЛЯ ПОДЪЕМА
ГОУ ВПО
Уральский государственный горный университет

УСТРОЙСТВА
ДЛЯ ЗАХВАТА ТРУБ ДЛЯ ПОДЪЕМА
к выполнению лабораторных работ по дисциплине
“Расчет и конструирование машин и оборудования
нефтяных и газовых промыслов”
для студентов специальности
и газовых промыслов”
 2008
2008
Устройства захвата труб для подъема в бурении обычно называются элеваторами, хотя для этих целей могут применяться зажимные патроны, резьбовые ниппели, вертлюжные пробки, хомуты и другие устройства.
Элеваторы применяют для подвешивания на талевой системе или столе ротора бурильных или обсадных труб при выполнении СПО, а также для укладки труб. В установках с подвижным вращателем (верхний привод) элеваторы могут выполнять функции свинчивания-развинчивания и манипулирования трубами.
Тип и конструкция труб определяет классификацию элеваторов по назначению. Например, элеваторы для бурильных труб, для обсадных труб, НКТ и штанг. Элеваторы для работы в установках с подвижным вращателем, для работы в составе комплекса АСП и т. д.
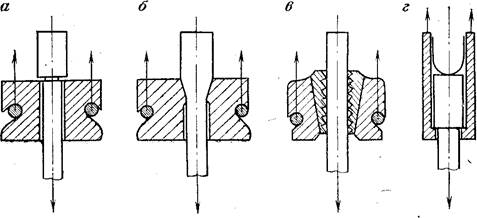
Схемы трубных элеваторов приведены на рисунке 1.
В установившейся практике бурения элеваторы подразделяют на створчатые, корпусные и автоматические.
Створчатый элеватор состоит из двух шарнирно соединённых между собой створок с рукоятками. В каждой створке имеется проушина для штропа с запирающим устройством против его самопроизвольного выпадения. Элеватор закрывается защёлкой с замковым устройством. При сведении рукояток створки соединяются, и подпруженная защёлка одной створки находит на зуб второй створки. Чтобы открыть ненагруженный элеватор, надо оттянуть защёлку и развести рукоятки со створками. Створчатые элеваторы применяются при небольшом весе бурильной колонны и работают, как правило, в паре с пневмоклиньями.
Элеваторы для подвешивания бурильных и обсадных труб применяют при нагрузках 1250–3200 кН. Это корпусные элеваторы типа ЭК диаметрами 114–426 мм и типа КМ диаметрами 89–377 мм. Для нагрузок 320 –1250 кН и диаметров труб 48–127 мм применяют двуштропные литые элеваторы типа ЭТАД.
Корпусной элеватор типа КМ (рисунок 2) состоит из корпуса 1 и створки 5. В левой части корпуса 1 элеватора укреплена защелка 2 с пружиной, удерживающая створку в закрытом положении. На створке шарнирно укреплена рукоятка 3 с эксцентриком, при повороте которой одновременно открываются защелка и створка элеватора. Шарнирные самозапирающиеся фиксаторы 4 в проушинах элеватора обеспечивают свободный ввод штропов в проушины и предотвращают самопроизвольное выпадение их в процессе работы. Для вывода штропов из проушин фиксаторы открывают вручную крючком.
В верхней части корпус имеет предохранительную расточку, исключающую возможность выхода трубы из элеватора, находящегося под нагрузкой при спуско-подъёмных операциях; опорные поверхности элеватора под муфту трубы обрабатывают токами высокой частоты до твёрдости 45 –50 HRC.
В таблице 1 приведена техническая характеристика корпусных элеваторов типа КМ.
| Тип | Грузоподъемность, кН, не более | Условный диаметр захватываемых труб, мм | Габариты, мм, не более | Масса, кг, не более |
| КМ 60-125 | 67,0 | |||
| KM 60H-125 KM 73-125 | 610´225´250 | 66,0 63,0 | ||
| KM 7.3Н/НП-125 | 62,0 | |||
| KM 89-125 | 81,5 | |||
| KM 89Н/НП-125 | 645´250´250 | 80,5 | ||
| KM 102-125 | 77,5 | |||
| KM 102H-125 | 75.5 | |||
| KM 114-140 KM 114H-140 KM 114НП-140 KM 127-140 KM 127НП-140 | 670´295´260 | 94.0 91,0 92,0 89,0 86,0 | ||
| KM 129Л-140 | 89,0 | |||
| KM 140-170 | 131,0 | |||
| KM 140H-170 | 755´325´290 | 127,0 | ||
| KM 146-170 | 128,0 | |||
| KM 146П/НП-170 | 125,0 | |||
| KM 168-170 | 780´345´290 | 134,0 | ||
| KM 168П/НП-170 | 129,0 | |||
| KM 178-170 | 129,0 | |||
| KM 89-200 | 120,5 | |||
| KM 89Н/НП-200 КМ 102-200 | 710´255´310 | 119,5 116,5 | ||
| KM 102H-200 | 113,5 | |||
| KM 114H-250 | 151,0 | |||
| KM 114-250 | 155,0 | |||
| KM 114НП-250 KM 127-250 | 760´315´320 | 152,0 149,0 | ||
| KM 127НП-250 | 144,0 | |||
| KM 140-320 | 193,0 | |||
| KM 140H-320 | 188,0 | |||
| KM 146-320 | 189,0 | |||
| KM 146П/НП-320 KM 168-320 | 800´340´350 | 185,0 177,0 | ||
| KM 168П/НП-320 | 171,0 | |||
| KM 178-320 | 171,0 | |||
| KM 194-320 | 850´390´350 | 261,0 | ||
| KM 219-320 | 850´390´350 | 237,0 | ||
| KM 245-320 | 900´435´350 | 295,0 | ||
| KM 273-320 | 900´435´350 | 265,0 | ||
| KM 299-320 | 1020´490´350 | 340,0 | ||
| KM 324-320 | 1020´490´350 | 310,0 | ||
| KM 340-320 | 1070´510´350 | 363,0 | ||
| KM 351-320 | 1070´510´350 | 352,0 | ||
| KM 377-320 | 1100´535´350 | 395,0 |
Корпусные элеваторы типа ЭК изготовляют для следующих диаметров труб: 60, 73, 89, 102, 114, 127, 140 и 168 мм и для предельных нагрузок: 1100, 1400, 1700, 2000, 2500 и 3200 кН, по ГОСТ 25362 –82 (СТ СЭВ 3187 –81).
Правая створка на передней части имеет бурт полукруглой формы, который в момент закрытия элеватора входит в паз корпуса и тыльной частью упирается в защёлку. Благодаря двум пружинам 5 и 13 защёлка всё время находится в прижатом к корпусу положении. Ось 9, соединяющая обе створки, наклонена к вертикальной оси элеватора под углом 10°, что исключает самопроизвольное открытие элеватора под нагрузкой.
Назначение наклонной оси ещё и в том, что после открытия элеватора под действием пружины он, поворачиваясь на штропах, отталкивается от трубы, т.е. не нужно дополнительного усилия рабочего. Чтобы штропы не выходили из проушин, имеются предохранители 7, закреплённые пальцем 6. Этот тип элеватора используется при спуско-подъёмных операциях с клиновым захватом. Посадка элеватора на ротор не допускается.
Техническая характеристика элеваторов ЭАЛ приведена в таблице 2.
| Параметры | ЭАЛ-1-114 | ЭАЛ-1-141 | ЭАЛ-1-168 |
| Допускаемая нагрузка, МН | 0,75 | 1,25 | 1,25 |
| Диаметр расточки, мм | |||
| Размеры, мм: длина | |||
| ширина | |||
| высота | |||
| Масса, кг | 76,5 | 88,7 | 98,2 |
При спуске в скважину обсадных труб используют литые элеваторы ЭН и кованные элеваторы ЭО и ЭКО, которые относятся к типу корпусных элеваторов с одной створкой (дверкой).
Штропы представляют собой промежуточное звено между крюком и элеватором, на котором подвешивается колонна бурильных или обсадных труб. В настоящее время применяются одно- и двухветвевые штропы. Одноветвевые штропы на 15 –20 % легче двухветвевых. Штропы – это вытянутые на одной оси стальные петли овальной конфигурации, один конец которых изогнут для более удобного расположения в рогах подъёмного крюка. Иногда в нижней части имеются ручки.
Техническая характеристика штропов приведена в таблице 3.
| Шифр | ШБН-300 | ШБН-200 | ШБН-125 | ШБУ*-125 |
| Допускаемая нагрузка, МН | 1,25 | 1,25 | ||
| Длина L, м | 1,89 | 1,20 | ||
| Диаметр D, мм | ||||
| Масса пары, кг |
Автоматический элеватор ЭА-320 предназначен для автоматического захвата и освобождения колонны бурильных труб при выполнении спуско-подъёмных операций с помощью комплекса АСП. Элеватор может захватывать стальные бурильные трубы диаметрами 89, 114, 127 и 140 мм и легкосплавные трубы диаметрами 114, 129 и 147 мм. Масса элеватора 2475 кг. Вставить рис.3.2
Элеватор для подвижного вращателя установки УРБ-2А-2 предназначен для спуска и подъема, а также свинчивания и развинчивания и укладки труб.
Элеватор состоит из следующих основных деталей: шпинделя 11, корпуса 5, сменного штуцера 4, обоймы 3 и затвора 12.
Элеватор крепится на шпинделе вращателя с помощью двух полуколец 9, штуцера 4 и болтов 6.
В нижней части корпуса 5 при помощи осей 2 закреплена обойма 3, в пазу которой установлен затвор 12. Величина хода затвора в обойме ограничивается упорами 15.
Для захвата трубы элеватором необходимо совместить отверстия обоймы и затвора и в образовавшееся отверстие ввести муфту трубы до совмещения ее верхних лысок с прорезью затвора, затем закрыть затвор.
Затвор в закрытом и открытом положениях фиксируется двумя пружинными фиксаторами, кроме того, при вращении он удерживается в закрытом положении центробежной силой.
Во время спуско-подъемных операций корпус 5 находится в нижнем положении по отношению к шпинделю 11 и своими кулачками ложится на фланец шпинделя.
В этом положении корпус может свободно проворачиваться относительно шпинделя, что обеспечивает безопасность работ, так как исключается вращение инструмента при случайном включении вращателя.
При наращивании инструмента для соединения штуцера с бурильной трубой необходимо шпиндель 11 опустить вниз относительно корпуса 5 так, чтобы резьбовой конец штуцера зашел в муфту трубы, и дать вращение шпинделю, в процессе чего штуцер навернется на трубу. При этом кулачки корпуса 5 находятся выше кулачков шпинделя 11 и не препятствуют вращению шпинделя относительно корпуса.
Во время бурения крутящий момент со шпинделя вращателя передается через шпиндель элеватора, болты 6 и штуцер 4 на бурильную трубу.
Для свинчивания и развинчивания инструмента необходимо установить шпиндель в среднее положение относительно корпуса 5 так, чтобы кулачки шпинделя и корпуса находились в зацеплении. В этом положении крутящий момент от шпинделя вращателя посредством шлиц передается через шпиндель элеватора, корпус 5, оси 2, обойму 3 и затвор 12 на бурильную трубу. Среднее положение шпинделя относительно корпуса устанавливается совмещением кромки кожуха с проточкой корпуса.
При укладке труб в горизонтальное положение обойма 3 элеватора вместе с затвором поворачивается вокруг осей 2.
Параметрическая классификация элеваторов базируется на величине двух параметров: грузоподъемность и диаметр труб. Параметры наиболее часто применяемых в глубоком бурении элеваторов приведены в таблице.
Штропы, на которых подвешивается элеватор, служат промежуточным звеном между элеватором и талевым крюком. Грузоподъемность штропов определяется аналогично грузоподъемности элеватора.
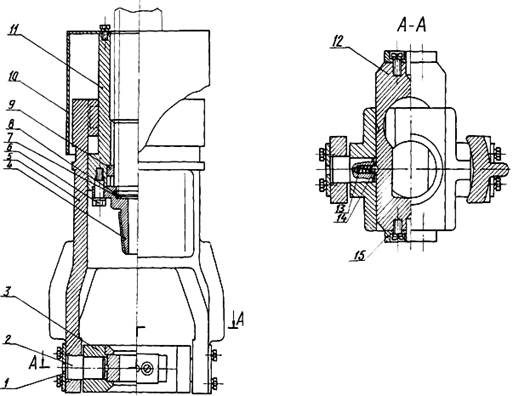
1-крышка; 2-ось; 3-обойма; 4- сменный штуцер к элеватору; 5-корпус; 6-болт; 7-прокладка; 8-кольцо; 9-полукольцо; 10-кожух; 11-шпиндель; 12-затвор; 13-пружина; 14-шарик; 15-упор.
Расчет элеватора проводится с учетом динамичности. Принимая коэффициент динамичности 1,25, будем иметь расчетную нагрузку на элеватор
 Qp=1,25·Q.
Qp=1,25·Q.
Нагрузка Q распределяется на корпус и затвор элеватора пропорционально центральным углам обхвата a1 и a2 (рисунок 4).
Если нагрузки на корпус и затвор элеватора обозначим соответственно через Р1 и Р2, то
В элеваторе рассчитывается затвор, нагруженный сплошной нагрузкой Р2 (рисунок 5), который следует рассматривать как балку на двух опорах; одной из опор является опорная поверхность затвора, а другой – шарнир.
Опасным в затворе является сечения I-I.
Обозначив реакции опор соответственно через R1 и R2, имеем
Сечение I-I подвергается изгибу силой R1 на плече n.
Напряжение в сечении I-I
Корпус элеватора (рисунок 6) обычно рассчитывается как балка на двух опорах, нагруженная сплошной нагрузкой Р1 и двумя сосредоточенными нагрузками. Вследствие изогнутой формы корпус под действием внешних сил подвергается одновременно изгибу и кручению.
Изгибающий и крутящий моменты сечения I-I определяются по формулам:
где Qp/2 – реакция в точке подвеса элеватора;
l – расстояние между точками подвеса;
R1 – сила действия затвора на корпус;
r – расстояние от точки приложения силы R1 до данного сечения – плечо изгибающего момента от силы R1 (определяется графически);
x – расстояние от центра тяжести площади передачи давления части труб, заключенной в угле (a+j), до центра элеватора; определяется по формуле
где а – наружный радиус;
а1 – внутренний радиус кольцевой площади передачи давления на элеватор.
Пренебрегая кручением, определим напряжения от изгибающего момента.
Максимальное нормальное напряжение определяется по формуле
где W – момент сопротивления сечения корпуса.
Изгибающий момент Мизг достигает максимального значения при a=90°, т.е. в центральном сечении корпуса.
Подставив в формулу напряжения значение изгибающего момента при a=90°, находим напряжение в центральном сечении.
Проушина корпуса рассчитывается по наиболее опасному сечению II-II (рисунок 7).
Изгибающий момент в сечении проушины определяется по формуле
где r – радиус проушины;
Момент сопротивления переменного сечения определяется по формуле
где b – ширина сечения (проушины);
h – высота от центра проушины до верхнего торца проушины.
Затем находим максимальное нормальное напряжение, возникающее в проушине корпуса.