Что такое угол «Аккермана»

Угол Аккермана применимо к дрифту.
В гражданских автомобилях всегда присутствует положительный угол Аккермана, т.к. если автомобиль поворачивает, то радиусы, по которым катятся правое и левое колесо разные и соответственно они должны быть повернуты на разный угол. Если их повернуть параллельно, то возникнет эффект сильного положительного схождения, морда будет тормозить, износ будет повышенный, настолько, что при парковке от передних колес будут оставаться черные полосы на асфальте. Впрочем именно объяснение необходимости поворота колес автомобиля на разный угол хорошо объяснено во многих источниках.
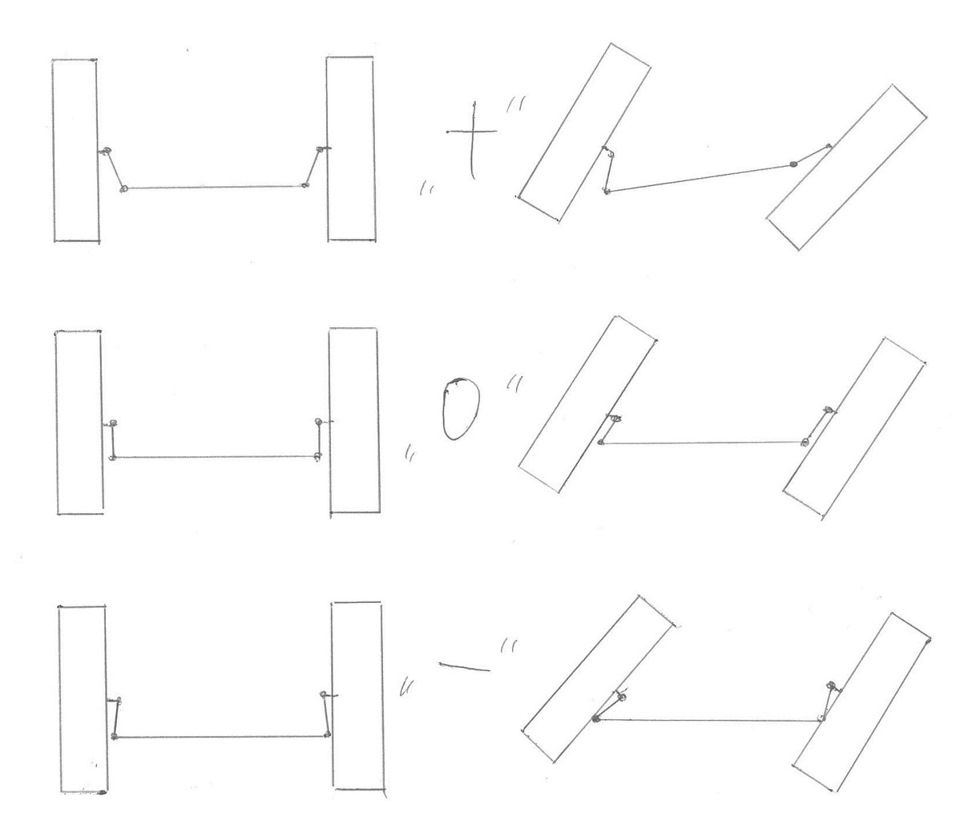
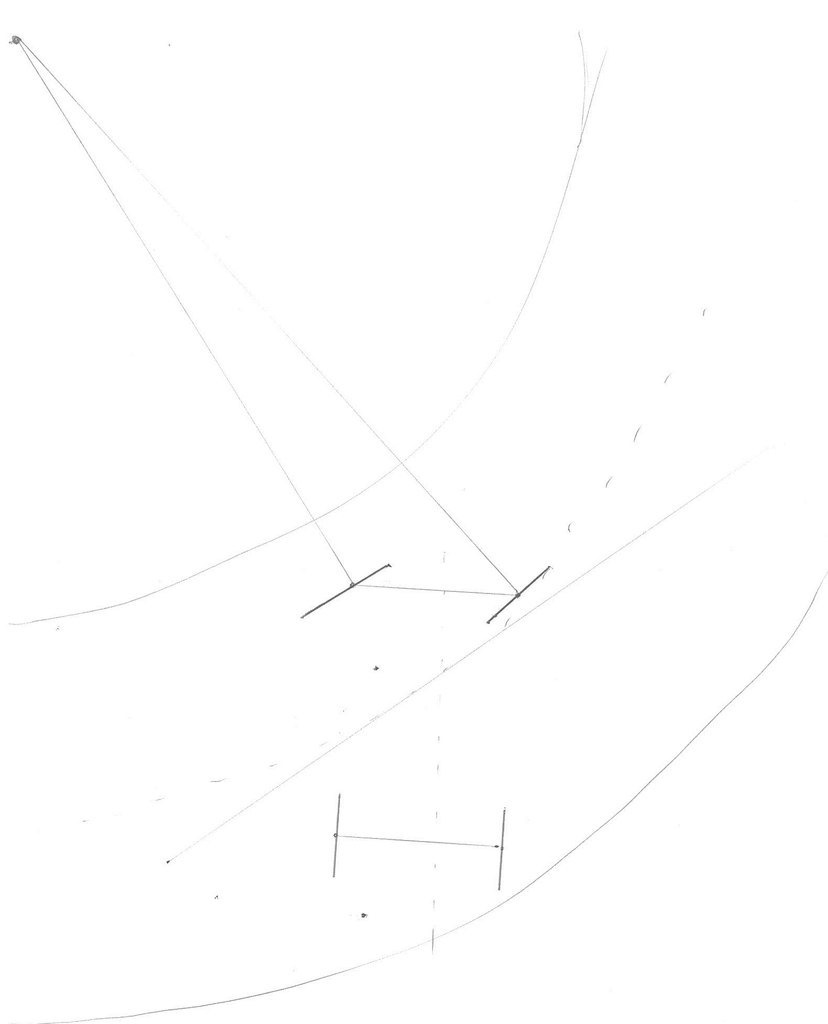
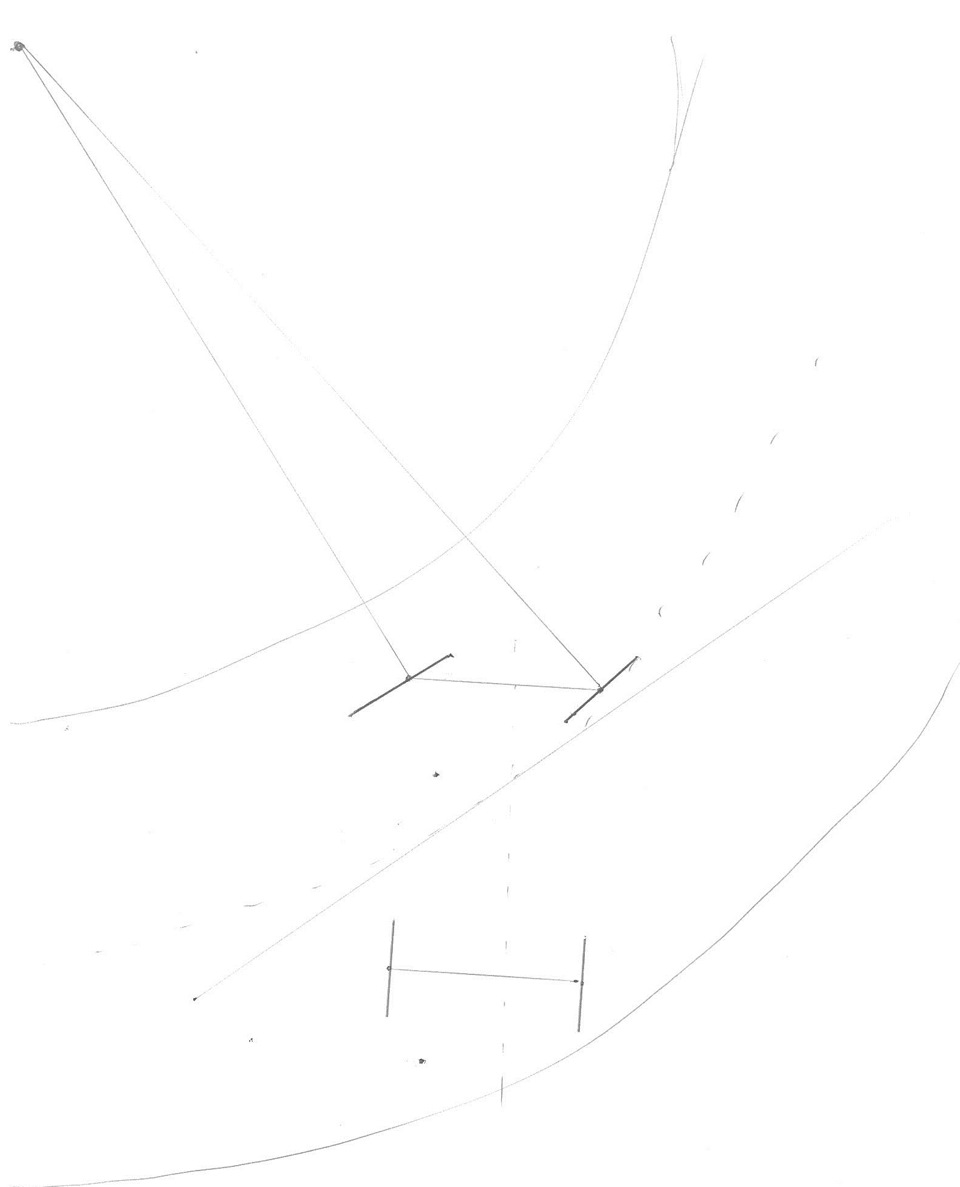
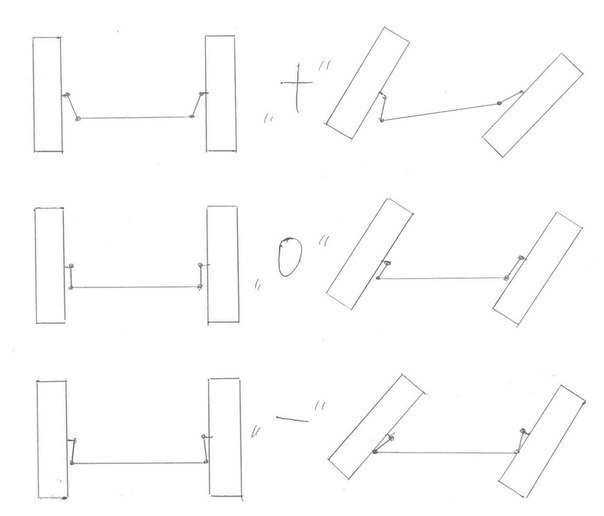
А теперь перейдем к самому интересному, к дрифту. В дрифте машина едет боком, под углом к оси траектории, и если мы рассмотрим автомобиль со сток Аккерманом, то мы увидим, что машина едет боком, а колеса ее смотрят в разные стороны, и находятся в огромном отрицательном схождении, последствия этого – сильный износ передних колес именно в дрифте, сильное сопротивление качению на морде, оттого падение темпа и ухудшение управляемости. Если мы убираем угол Аккермана и ставим сошки параллельно, то при движении боком колеса стоят параллельно, износа передних колес при движении в дрифте практически не будет (в отличии от гражданской эксплуатации такой машины), сопротивления качению не будет, скорость ощутимо вырастет. Казалось бы все просто и понятно, но не тут то было, ведь в дрифте машина едет по обратной дуге, а значит колеса опять надо поворачивать на разный угол, но уже наоборот, т.к. машина поворачивает в обратную сторону. Колеса смотрят вправо, а машина едет по левой дуге. И принципы расчета угла Аккермана тут точно такие же, только считать надо от центра дуги, поставив машину боком, таким образом угол Аккермана будет отрицательным (Рис 3). Но если для прямолинейного движения угол Аккермана постоянен, то для движения в заносе он будет зависеть от угла заноса, от радиуса поворота, т.е. невозможно сделать идеально. Можно прикинуть конфигурацию типовой трассы, и посчитать радиусы наиболее распространенных дуг и настроить на них. И то, если мы расчитаем угол так, что колеса будут идти по идеальной дуге на повороте радиусом 50 м, в угле заноса 35°, то при проваливании в угол 50°, идиллия нарушится. Вот так все непросто с отрицательным углом Аккермана, который так любят в вайс фабе)).
Про непосредственно расчет правильного угла речи не веду, это чистой воды геометрия, пусть ею занимаются производители, мы все равно все это херим) Как поймать нулевой угол смысла писать нет, т.к. все подвески разные, но в любом случае точка крепления рулевого наконечника к сошке будет параллельна оси поворота колес. Другими словами, расстояние между сошками равно расстоянию между осями поворота колес, но т.к. ось поворота редко строго вертикальна, то расстояние надо мерять именно на уровне расположения сошки.
Итоги:
— сток Аккерман в дрифте –отстой,
— лучше всего ехать в заносе с нулевым Аккерманом, а в идеале надо делать очень маленький отрицательный угол, но он будет подходить только поворотам определенного радиуса.
— если машина используется в повседневной эксплуатации с периодическими прохватами боком – лучше уменьшить Аккерман в 2-3 раза, но оставить его положительным.
— не всегда теория работает на практике и надо экспериментировать с разными углами, все машины разные, стиль пилотирования тоже отличается, поэтому вообще все настройки подвески надо подбирать индивидуально.
Прошу уважать труд автора и не воровать текст)
Принцип Аккермана в рулевом управлении

📖 Принцип Аккермана определяет геометрию рулевого управления, которая применима для любых транспортных средств, с целью обеспечения корректного угла поворота рулевых колес при прохождении поворота или кривой.
До того, как принцип был разработан, транспортные средства того времени (с лошадиной тягой) были снабжены параллельными рулевыми рычагами и страдали от плохих характеристик рулевого управления. Рудольф Аккерман известен разработкой принципа использования наклонных рулевых рычагов, который устраняет эту проблему рулевого управления в транспортных средствах.
Рисунок изображает автомобиль, идущий через поворот (в данном случае, поворот бесконечен). Красные линии изображают путь, по которому движутся колеса. Вы можете заметить, что внутренние колеса автомобиля следуют по окружности меньшего диаметра, чем внешние колеса.
Если оба колеса повернуты на одинаковую величину, внутреннее колесо будет скрестись по дороге (будет скользить боком) и будет снижать эффективность рулевого управления. Это скольжение колеса, которое также создает нежелательный нагрев и износ колеса, может быть устранено с помощью поворота внутреннего колеса на больший угол, чем угол поворота внешнего колеса.
Различие в углах внутреннего и внешнего колес может быть лучше понято путем изучения рисунка, где помечены внутренний и внешний радиусы, по которым движутся каждое из колес. Внутренний радиус (Ri) и внешний радиус (Ro) зависят от ряда факторов, включая ширину автомобиля и крутизну поворота, который собирается пройти автомобиль.
Расположение обоих колес в надлежащем направлении движения обеспечивает стабильное управление без чрезмерного износа и нагрева каждого из колес.
Очевидно, что при повороте одного из колес более, чем другого, вы рассогласовываете направление колес и вам нужно это сделать в то же время обеспечивая прямое направление обоих колес, когда автомобиль не поворачивает. Для обеспечения этого, необходимо, чтобы рассогласование направления росло от нулевого значения (колеса направлены прямо вперед) до точки, в которой существует значительное различие в углах между обоими колесами (при максимальном повороте колес).
Угол Аккермана. Автор Роман Пульников

Угол Аккермана применимо к дрифту.
В гражданских автомобилях всегда присутствует положительный угол Аккермана, т.к. если автомобиль поворачивает, то радиусы, по которым катятся правое и левое колесо разные и соответственно они должны быть повернуты на разный угол. Если их повернуть параллельно, то возникнет эффект сильного положительного схождения, морда будет тормозить, износ будет повышенный, настолько, что при парковке от передних колес будут оставаться черные полосы на асфальте. Впрочем именно объяснение необходимости поворота колес автомобиля на разный угол хорошо объяснено во многих источниках.
А теперь перейдем к самому интересному, к дрифту. В дрифте машина едет боком, под углом к оси траектории, и если мы рассмотрим автомобиль со сток Аккерманом, то мы увидим, что машина едет боком, а колеса ее смотрят в разные стороны, и находятся в огромном отрицательном схождении, последствия этого – сильный износ передних колес именно в дрифте, сильное сопротивление качению на морде, оттого падение темпа и ухудшение управляемости. Если мы убираем угол Аккермана и ставим сошки параллельно, то при движении боком колеса стоят параллельно, износа передних колес при движении в дрифте практически не будет (в отличии от гражданской эксплуатации такой машины), сопротивления качению не будет, скорость ощутимо вырастет. Казалось бы все просто и понятно, но не тут то было, ведь в дрифте машина едет по обратной дуге, а значит колеса опять надо поворачивать на разный угол, но уже наоборот, т.к. машина поворачивает в обратную сторону. Колеса смотрят вправо, а машина едет по левой дуге. И принципы расчета угла Аккермана тут точно такие же, только считать надо от центра дуги, поставив машину боком, таким образом угол Аккермана будет отрицательным (Рис 3). Но если для прямолинейного движения угол Аккермана постоянен, то для движения в заносе он будет зависеть от угла заноса, от радиуса поворота, т.е. невозможно сделать идеально. Можно прикинуть конфигурацию типовой трассы, и посчитать радиусы наиболее распространенных дуг и настроить на них. И то, если мы расчитаем угол так, что колеса будут идти по идеальной дуге на повороте радиусом 50 м, в угле заноса 35°, то при проваливании в угол 50°, идиллия нарушится. Вот так все непросто с отрицательным углом Аккермана, который так любят в вайс фабе)).
Про непосредственно расчет правильного угла речи не веду, это чистой воды геометрия, пусть ею занимаются производители, мы все равно все это херим) Как поймать нулевой угол смысла писать нет, т.к. все подвески разные, но в любом случае точка крепления рулевого наконечника к сошке будет параллельна оси поворота колес. Другими словами, расстояние между сошками равно расстоянию между осями поворота колес, но т.к. ось поворота редко строго вертикальна, то расстояние надо мерять именно на уровне расположения сошки.
Итоги:
— сток Аккерман в дрифте –отстой,
— лучше всего ехать в заносе с нулевым Аккерманом, а в идеале надо делать очень маленький отрицательный угол, но он будет подходить только поворотам определенного радиуса.
— если машина используется в повседневной эксплуатации с периодическими прохватами боком – лучше уменьшить Аккерман в 2-3 раза, но оставить его положительным.
— не всегда теория работает на практике и надо экспериментировать с разными углами, все машины разные, стиль пилотирования тоже отличается, поэтому вообще все настройки подвески надо подбирать индивидуально.
Прошу уважать труд автора и не воровать текст)
Угол Аккермана применимо к дрифту.

Начну с того, что мало у кого (даже среди дрифтеров) есть понимание, что же такое этот самый угол Аккермана, во многих дрифт сообществах то и дело выкладываются статьи, пытающиеся раскрыть, что это за угол, и каким он должен быть, которые не только не объясняют, а еще больше путают читателя, например статья, как настраивать угол Аккермана на радиоуправляемых полноприводных моделях в масштабе 1:10. Я, как уже зарекомендовавший себя дрифтер и производитель комплектов для увеличения выворота, расскажу об этом магическом угле, применимо именно к дрифту.

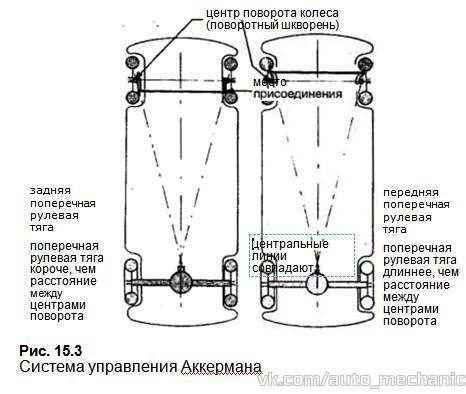
В гражданских автомобилях всегда присутствует положительный угол Аккермана, т.к. если автомобиль поворачивает, то радиусы, по которым катятся правое и левое колесо разные и соответственно они должны быть повернуты на разный угол (Рис.2). Если их повернуть параллельно, то возникнет эффект сильного положительного схождения, морда будет тормозить, износ будет повышенный, настолько, что при парковке от передних колес будут оставаться черные полосы на асфальте. Впрочем именно объяснение необходимости поворота колес автомобиля на разный угол хорошо объяснено во многих источниках.
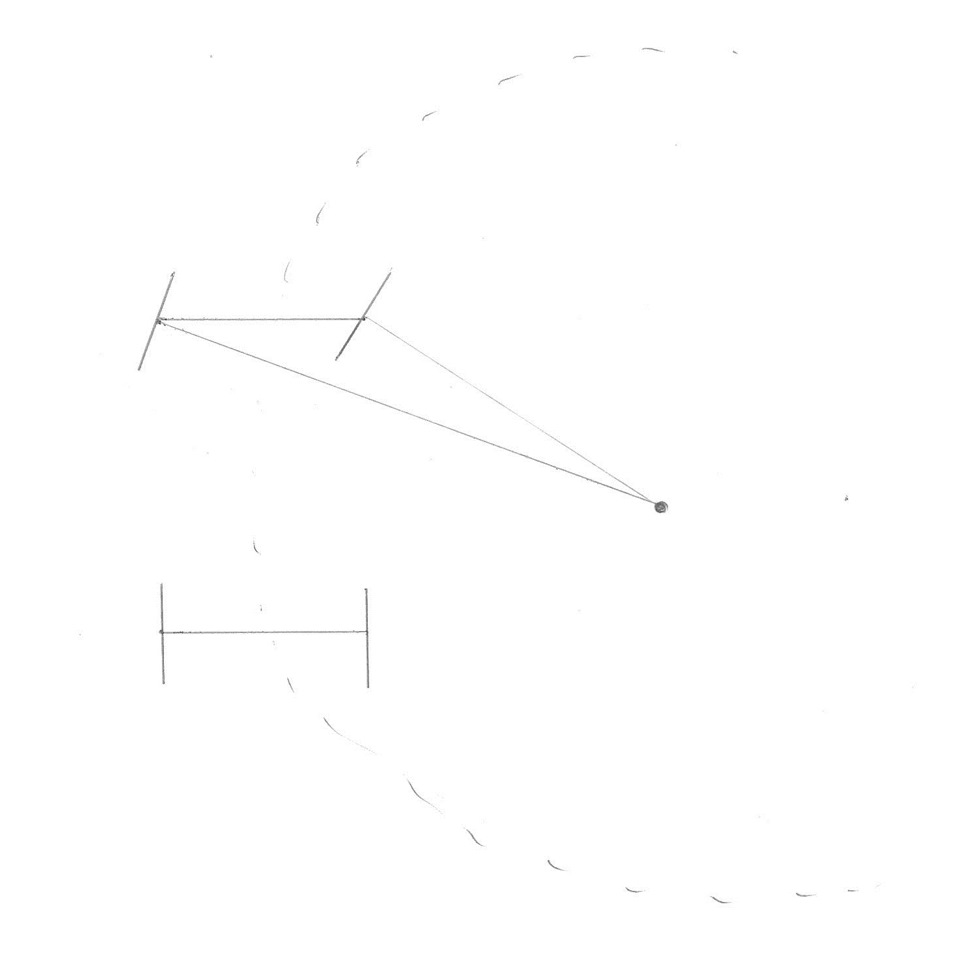
А теперь перейдем к самому интересному, к дрифту. В дрифте машина едет боком, под углом к оси траектории, и если мы рассмотрим автомобиль со сток Аккерманом, то мы увидим, что машина едет боком, а колеса ее смотрят в разные стороны, и находятся в огромном отрицательном схождении, последствия этого – сильный износ передних колес именно в дрифте, сильное сопротивление качению на морде, оттого падение темпа и ухудшение управляемости. Если мы убираем угол Аккермана и ставим сошки параллельно, то при движении боком колеса стоят параллельно, износа передних колес при движении в дрифте практически не будет (в отличии от гражданской эксплуатации такой машины), сопротивления качению не будет, скорость ощутимо вырастет. Казалось бы все просто и понятно, но не тут то было, ведь в дрифте машина едет по обратной дуге, а значит колеса опять надо поворачивать на разный угол, но уже наоборот, т.к. машина поворачивает в обратную сторону. Колеса смотрят вправо, а машина едет по левой дуге. И принципы расчета угла Аккермана тут точно такие же, только считать надо от центра дуги, поставив машину боком, таким образом угол Аккермана будет отрицательным (Рис 3). Но если для прямолинейного движения угол Аккермана постоянен, то для движения в заносе он будет зависеть от угла заноса, от радиуса поворота, т.е. невозможно сделать идеально. Можно прикинуть конфигурацию типовой трассы, и посчитать радиусы наиболее распространенных дуг и настроить на них. И то, если мы расчитаем угол так, что колеса будут идти по идеальной дуге на повороте радиусом 50 м, в угле заноса 35°, то при проваливании в угол 50°, идиллия нарушится. Вот так все непросто с отрицательным углом Аккермана, который так любят в вайс фабе)).
Про непосредственно расчет правильного угла речи не веду, это чистой воды геометрия, пусть ею занимаются производители, мы все равно все это херим) Как поймать нулевой угол смысла писать нет, т.к. все подвески разные, но в любом случае точка крепления рулевого наконечника к сошке будет параллельна оси поворота колес. Другими словами, расстояние между сошками равно расстоянию между осями поворота колес, но т.к. ось поворота редко строго вертикальна, то расстояние надо мерять именно на уровне расположения сошки.
Итоги:
— сток Аккерман в дрифте –отстой,
— лучше всего ехать в заносе с нулевым Аккерманом, а в идеале надо делать очень маленький отрицательный угол, но он будет подходить только поворотам определенного радиуса.
— если машина используется в повседневной эксплуатации с периодическими прохватами боком – лучше уменьшить Аккерман в 2-3 раза, но оставить его положительным.
— не всегда теория работает на практике и надо экспериментировать с разными углами, все машины разные, стиль пилотирования тоже отличается, поэтому вообще все настройки подвески надо подбирать индивидуально.
Угол Аккермана.

Угол Аккермана применимо к дрифту.

Начну с того, что мало у кого (даже среди дрифтеров) есть понимание, что же такое этот самый угол Аккермана, во многих дрифт сообществах то и дело выкладываются статьи, пытающиеся раскрыть, что это за угол, и каким он должен быть, которые не только не объясняют, а еще больше путают читателя, например статья, как настраивать угол Аккермана на радиоуправляемых полноприводных моделях в масштабе 1:10. Сегодня мы расскажем вам об этом магическом угле, применимо именно к дрифту.

В гражданских автомобилях всегда присутствует положительный угол Аккермана, т.к. если автомобиль поворачивает, то радиусы, по которым катятся правое и левое колесо разные и соответственно они должны быть повернуты на разный угол (Рис.2). Если их повернуть параллельно, то возникнет эффект сильного положительного схождения, морда будет тормозить, износ будет повышенный, настолько, что при парковке от передних колес будут оставаться черные полосы на асфальте. Впрочем именно объяснение необходимости поворота колес автомобиля на разный угол хорошо объяснено во многих источниках.
А теперь перейдем к самому интересному, к дрифту. В дрифте машина едет боком, под углом к оси траектории, и если мы рассмотрим автомобиль со сток Аккерманом, то мы увидим, что машина едет боком, а колеса ее смотрят в разные стороны, и находятся в огромном отрицательном схождении, последствия этого – сильный износ передних колес именно в дрифте, сильное сопротивление качению на морде, оттого падение темпа и ухудшение управляемости. Если мы убираем угол Аккермана и ставим сошки параллельно, то при движении боком колеса стоят параллельно, износа передних колес при движении в дрифте практически не будет (в отличии от гражданской эксплуатации такой машины), сопротивления качению не будет, скорость ощутимо вырастет. Казалось бы все просто и понятно, но не тут то было, ведь в дрифте машина едет по обратной дуге, а значит колеса опять надо поворачивать на разный угол, но уже наоборот, т.к. машина поворачивает в обратную сторону. Колеса смотрят вправо, а машина едет по левой дуге. И принципы расчета угла Аккермана тут точно такие же, только считать надо от центра дуги, поставив машину боком, таким образом угол Аккермана будет отрицательным (Рис 3). Но если для прямолинейного движения угол Аккермана постоянен, то для движения в заносе он будет зависеть от угла заноса, от радиуса поворота, т.е. невозможно сделать идеально. Можно прикинуть конфигурацию типовой трассы, и посчитать радиусы наиболее распространенных дуг и настроить на них. И то, если мы расчитаем угол так, что колеса будут идти по идеальной дуге на повороте радиусом 50 м, в угле заноса 35°, то при проваливании в угол 50°, идиллия нарушится. Вот так все непросто с отрицательным углом Аккермана, который так любят в вайс фабе)).

Про непосредственно расчет правильного угла речи не веду, это чистой воды геометрия, пусть ею занимаются производители, мы все равно все это херим) Как поймать нулевой угол смысла писать нет, т.к. все подвески разные, но в любом случае точка крепления рулевого наконечника к сошке будет параллельна оси поворота колес. Другими словами, расстояние между сошками равно расстоянию между осями поворота колес, но т.к. ось поворота редко строго вертикальна, то расстояние надо мерять именно на уровне расположения сошки.