Контролируемый телемеханический пункт – место размещения объектов, контролируемых или управляемых средствами телемеханики




![]()
![]()
В первой главе даётся определение телемеханики как отрасли науки и техники, приводятся особенности, отличающие телемеханику от смежных направлений техники и обычных систем автоматического управления, формулируются основные проблемы телемеханики. Краткая история развития телемеханики дополняется сведениями о широком применении телемеханических систем в Самарской области.
А 16
Рецензент канд. техн. наук, доцент В.Г. Щетинин
© Самарский государственный
технический университет, 2011
Дисциплина «Телемеханика» введена в учебный план специальности 220201 «Управление и информатика в технических системах» как дисциплина специализации. Это соответствует традиционному названию целого класса систем контроля и управления, широко применяемого в различных отраслях промышленности, в том числе в Самарском регионе. Объективно эти системы имеют ряд особенностей, существенно отличающий их от автоматизированных систем управления.
В настоящее время по дисциплине отсутствуют учебники и учебные пособия.
Во второй главевводятся основные понятия о системах телемеханики. Даётся характеристика различным типам объектов, наличие которых требует применения телемеханики, выполняющей различные телемеханические функции, рассмотрены основные структуры систем телемеханики.
В третьей главе рассмотрены вопросы организации многоканальной телемеханической связи, позволяющие использовать одну линию связи для контроля и управления множеством объектов.
В четвёртой главеприводится характеристика телемеханических кодов, применяемых в цифровых системах телемеханики. Большое внимание уделено корректирующим кодам, начиная с принципов их построения. Рассмотрены структуры, порядок построения наиболее широко применяемых корректирующих кодов.
В пятой главедана характеристика модуляции телемеханических сигналов, используемых для повышения помехоустойчивости передаваемых сообщений. Рассмотрены методы непрерывной модуляции и методы дискретной модуляции, приведены способы оценки спектров импульсных сигналов, применяемых в телемеханике.
В шестой главерассмотрены вопросы организации телемеханических линий и каналов связи. Основное внимание уделено проводным линиям связи, имеющим широкое распространение: дано определение первичным и вторичным параметрам, режиму и условиям согласованной передачи электромагнитной энергии по проводной линии, особенностям использования линий электропередач в телемеханике. Рассмотрены вопросы организации телемеханических каналов с применением радиосвязи, получающей всё большее распространение.
Вопросы помехоустойчивости систем телемеханики рассмотрены в седьмой главе. При передаче на большие расстояния телемеханические сигналы подвергаются воздействию помех и искажаются. Поэтому повышение помехоустойчивости, оцениваемое теорией В.А. Котельникова и реализуемое для телемеханики иными методами, является чрезвычайно актуальным.
Принципы построения телемеханических систем, рассмотренные в восьмой главе, приведены на примере системы телеизмерений с временным разделением сигналов. Телемеханическая функция телеизмерений, во-первых, является наиболее распространённой в системах телемеханики, во-вторых, она является наиболее сложной в реализации. Приведено описание типовой структуры комплекса устройств цифровой системы телеизмерений, рассмотрены вопросы синхронизации и синфазирования работы распределителей.
В заключительной девятой главерассмотрены вопросы реализации систем телемеханики, построения основных функциональных блоков и узлов.
Во многих случаях возникает необходимость контролировать состояние и управлять режимами работы современных объектов, которые рассредоточены на больших площадях или расстояниях. Это магистральные продуктопроводы, нефтяные и газовые месторождения, электрические сети, железнодорожные магистрали и другие. Такие объекты управления отличаются от обычных объектов одним фактором – расстоянием между объектом контроля или управления и местом, с которого производится управление, где вырабатываются команды управления или отображается состояние объектов.

Применение обычных систем автоматического управления для таких объектов оказывается неэффективным, так как каждый объект требует отдельного канала связи, по которому передаются сигналы от объекта до места выработки команд и обратно. Кроме того, передача на большие расстояния сигналов контроля и управления сопровождается их искажением.
Чтобы преодолеть влияние фактора расстояния и сделать это наиболее экономичным способом, применяются специальные системы, получившие название телемеханических систем. Поэтому целью настоящей дисциплины является изучение принципов построения, отличительных особенностей, типовых задач, решаемых при создании систем телемеханики.
Изучение теоретических вопросов дополняется выполнением курсового проекта, работа над которым позволяет закрепить получаемые знания практическим проектированием.
1. ПРЕДМЕТ ТЕЛЕМЕХАНИКИ
1.1. ОПРЕДЕЛЕНИЕ, ОСОБЕННОСТИ
И ОСНОВНЫЕ ПРОБЛЕМЫ ТЕЛЕМЕХАНИКИ
Термин «телемеханика», введенный в 1905 г. французским инженером Э. Бранли, состоит из двух греческих слов: Tе1е – далеко и Mechanike – мастерство, или наука о машинах.
Телемеханика – отрасль науки и техники, охватывающая теорию и технические средства контроля и управления объектами на расстоянии с применением специальных преобразователей сигналов для эффективного использования каналов связи.
В телемеханике передача информации осуществляется без непосредственного участия человека, человек-оператор находится в пункте управления, где принимает информацию о состоянии контролируемых объектов, а также может вырабатывать команды управления. Однако в некоторых областях применения телемеханики (медицина, космос, спорт и т.п.) человек находится на обеих сторонах передачи, но на одной из сторон он является объектом контроля.
Кроме телемеханики, имеется ряд отраслей техники, занимающихся передачей информации – телеграф, телефон, телевидение и др. Хотя научные основы всех методов и средств передачи информации, в том числе телемеханики, базируются на общей теории связи и теории информации, промышленная телемеханика имеет следующие особенности, отличающие телемеханику от перечисленных средств связи:
1. Необходимость высокой точности передачи информации. Например, системы телеизмерений могут иметь точность до 0,05%.
2. Недопустимость большого запаздывания в передаче информации при управлении, так как длительная задержка передаваемых сообщений в телемеханике в ряде случаев может вызвать аварию.
4. Отличие входных и выходных устройств систем телемеханики от таких же устройств в системах связи. Источниками информации в устройствах телемеханики являются датчики, командные устройства, а в системах связи – микрофон, передающая телевизионная камера.
5. Централизованность передачи информации. В телемеханике передача информации, как правило, осуществляется от объектов, которые рассредоточены на большой площади или расстоянии, в единый пункт управления, где находится человек-оператор или управляющий вычислительный комплекс.
При передаче телемеханической информации можно выделить следующие проблемы:
1) достоверности, т.е. передачи информации с малыми искажениями, возникающими как в аппаратуре, так и при передаче по линии связи из-за помех;
2) эффективности, т.е. нахождения способов лучшего использования аппаратуры и линии связи при передаче большого количества информации;
3) экономичности, т.е. построения простых и дешевых устройств телемеханики, обеспечивающих наибольшее количество передаваемой информации при наименьшей затрате средств.
Исходя из определения телемеханики структурную схему системы телемеханики можно представить в виде, отображённом на рис. 1.1. Как видно из рисунка, основными составляющими системы телемеханики (СТМ) являются устройство пункта управления, линии связи и устройство контролируемого пункта. В телемеханике широко используются следующие понятия.
Контролируемый телемеханический пункт (КП) – место размещения объектов, контролируемых или управляемых средствами телемеханики.
Телемеханический пункт управления (ПУ) – это место, с которого осуществляется управление или контроль состояния объектов, расположенных на контролируемом пункте. При частичной автоматизации в пункте управления находится диспетчер.
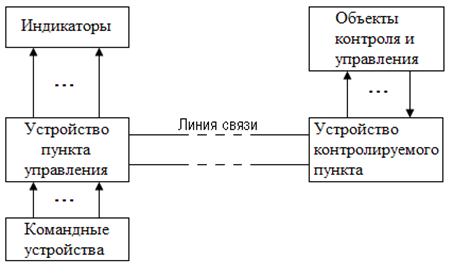
Рис. 1.1. Структурная схема системы телемеханики
Устройство телемеханики – совокупность технических средств телемеханики, расположенных на телемеханическом пункте управления или контролируемом телемеханическом пункте.
Комплекс устройств телемеханики – совокупность устройств пунктов управления и контролируемых пунктов, предназначенных для совместного применения в телемеханических системах.
Телемеханическая система – совокупность устройств пунктов управления и контролируемых пунктов, периферийного оборудования, необходимых линий и каналов связи, предназначенных для совместного выполнения телемеханических функций.
1.2. КРАТКАЯ ИСТОРИЯ РАЗВИТИЯ ТЕЛЕМЕХАНИКИ
Телемеханикакак область науки и техники возникла на базе развития автоматики, радиотехники и связи.
В начале 30-х годов в нашей стране первой отраслью промышленности, в которой стала применяться телемеханика, явились энергетические системы. Сначала применялись системы телеизмерения, а затем системы телеуправления и телесигнализации для централизованного управления генераторами на станциях, масляными выключателями на подстанциях и контроля исправности работы оборудования. Первая автоматизированная гидроэлектростанция с управлением на расстоянии была построена в нашей стране в 1932 г.
Несколько позже была осуществлена телемеханизация на канале им. Москвы. Телемеханика использовалась для телеуправления шлюзами, насосными станциями на расстоянии до 60 км из центрального диспетчерского пункта [2].
Телемеханические устройства строились в основном на электромеханических реле и электронных лампах с использованием многопроводных линий связи. Аппаратура получалась громоздкой, медленно действующей и не очень надёжной, каждая система создавалась как уникальная [3].
В 50-х годах создаётся промышленное производство телемеханических систем на специализированных заводах приборостроения. По критерию элементной базы можно выделить несколько поколений систем телемеханики.
Первое поколение было реализовано на быстродействующих бесконтактных элементах (полупроводниковых приборах, магнитных элементах с прямоугольной петлей гистерезиса, лампах с холодным катодом и т.п.). Эти элементы позволили отказаться от ненадёжных релейных контактов, начались серьезные теоретические исследования и практические работы по их использованию в телемеханике. Это не была автоматическая замена старых элементов новыми элементами. Более широкие возможности новых элементы потребовали новых идей в конструировании аппаратуры и длительных исследований. В результате было разработано много оригинальных бесконтактных телемеханических устройств, повысивших эффективность контроля и управления.
Второе поколение было основано на использовании унифицированных субблоков, из которых собиралась номенклатура выпускаемых систем телемеханики. Например, комплекс унифицированных субблоков «Спектр» представлял собой набор типовых блоков, каждый из которых был законченным функциональным элементом, сопрягаемым с другими функциональными элементами, имел объёмную конструкцию, заливаемую синтетической смолой. Примерами субблоков являются субблоки генератора тактовых импульсов, источников питания, шифратора, дешифратора и других функциональных элементов. Это повысило унификацию в производстве, вместо жёсткой конфигурации системы появился набор модификаций по выполняемым функциям и информационным объёмам, повысилась надёжность в эксплуатации. Преимущество субблоков «Спектр» было реализовано в комплексе устройств телемеханики «Нарт – 67».
Третье поколение (с середины 70-х годов) основано на применении интегральных микросхем, с использованием которых были разработаны укрупнённые функциональные блоки и узлы [4, 5]. Обобщались теоретические работы в области телемеханики [6]. Расширялась область применения телемеханики [7]. Устройства телемеханики на интегральных схемах эксплуатировались в течение длительного времени.
Четвёртое поколение (с середины 80-х годов) основано на применении больших интегральных схем (БИС), использование которых позволило перевести всю обработку информации в цифровую форму.
Современные системы телемеханики создаются как многоуровневые автоматизированные системы управления технологическими объектами и процессами, в которых на нижнем уровне в качестве управляющих устройств применяются программируемые логические контроллеры, а на верхнем – персональные ЭВМ.
Эффективность применения устройств и систем телемеханики сводится к следующему. Телемеханика увеличивает оперативность управления, сокращает численность обслуживающего персонала и повышает производительность труда, что в итоге увеличивает количество выпускаемой продукции и снижает ее себестоимость. В некоторых производственных процессах телемеханика позволяет высвободить людей с работ, опасных для здоровья, а при управлении движущимися объектами без телемеханики обойтись вообще невозможно.
1.3. ПРИМЕНЕНИЕ СИСТЕМ ТЕЛЕМЕХАНИКИ
В САМАРСКОЙ ОБЛАСТИ
Для промышленного производства Самарской области характерны объекты, расположенные на значительных площадях или расстояниях, т.е. распределённые объекты. Это нефтепромыслы, нефте- и газопроводы, сеть железных дорог, развитая сеть линий электропередач. Для контроля и управления этими объектами требуются телемеханические системы.
Нефтедобывающие предприятия ОАО «Самаранефтегаз» широко используют системы телемеханики для оперативного контроля режимов работы нефтедобывающих скважин (давление и температура скважины, обороты и производительность электронасоса и др.), что составляет нижний уровень автоматизированной системы управления.
В Приволжском управлении магистральных нефтепроводов все технологические параметры контролируются и управляются системами телемеханики. Технические специалисты в этой области готовились и готовятся в том числе на нашей специальности.
Объединение «Самаратрансгаз» аналогичным образом решает задачи автоматизации газопроводов.
Широкое применение находят различные системы телемеханики на железнодорожном транспорте. Их применение многопрофильно, устройства телемеханики заменили некоторые профессии, от которых остались лишь поговорки (например, профессия стрелочника).
В энергетике диспетчеризация процессов передачи электрической энергии решается на основе систем телемеханики, и крупным региональным центром диспетчеризации является объединение «Волгоэнерго», расположенное в г. Самаре.
Город Самара является одним из крупных мегаполисов России, и для поддержания его нормального функционирования также требуются системы телемеханики. В Самарском водоканале, например, диспетчеризация режимов работы технологического оборудования осуществляется с применением систем телемеханики.
Системы телемеханики применяются на ряде промышленных предприятий, представляющих собой сосредоточенные телемеханические объекты. Это нефтеперерабатывающий завод в г. Самаре, объединение «Тольяттиазот» в г. Тольятти, где энергетические объекты контролируются и управляются средствами телемеханики.
КЛЮЧЕВЫЕ ТЕРМИНЫ И ПОНЯТИЯ
Телемеханика – отрасль науки и техники, охватывающая теорию и технические средства контроля и управления объектами на расстоянии с применением специальных преобразователей сигналов для эффективного использования каналов связи.
ПУЭ 7. Правила устройства электроустановок. Издание 7
Раздел 3. Защита и автоматика
Глава 3.3. Автоматика и телемеханика
Телемеханика
3.3.88. Средства телемеханики (телеуправление, телесигнализация, телеизмерение и телерегулирование) должны применяться для диспетчерского управления территориально рассредоточенными электроустановками, связанными общим режимом работы, и их контроля. Обязательным условием применения средств телемеханики является наличие технико-экономической целесообразности (повышение эффективности диспетчерского управления, т.е. улучшение ведения режимов и производственных процессов, ускорение ликвидации нарушений и аварий, повышение экономичности и надежности работы электроустановок, улучшение качества вырабатываемой энергии, снижение численности эксплуатационного персонала и отказ от постоянного дежурства персонала, уменьшение площадей производственных помещений и т. п.).
Средства телемеханики могут применяться также для телепередачи сигналов систем АРЧМ, противоаварийной автоматики и других системных устройств регулирования и управления.
3.3.89. Объемы телемеханизации электроустановок должны определяться отраслевыми или ведомственными положениями и устанавливаться совместно с объемами автоматизации. При этом средства телемеханизации в первую очередь должны использоваться для сбора информации о режимах работы, состоянии основного коммутационного оборудования, изменениях при возникновении аварийных режимов или состояний, а также для контроля за выполнением распоряжений по производству переключений (плановых, ремонтных, оперативных) или ведению режимов эксплуатационным персоналом).
При определении объемов телемеханизации электроустановок без постоянного дежурства персонала в первую очередь должна быть рассмотрена возможность применения простейшей телесигнализации (аварийно-предупредительная телесигнализация на два или более сигналов).
3.3.90. Телеуправление должно предусматриваться в объеме, необходимом для централизованного решения задач по установлению надежных и экономически выгодных режимов работы электроустановок, работающих в сложных сетях, если эти задачи не могут быть решены средствами автоматики.
Телеуправление должно применяться на объектах без постоянного дежурства персонала, допускается его применение на объектах с постоянным дежурством персонала при условии частого и эффективного использования.
Для телеуправляемых электроустановок операции телеуправления, так же как и действие устройств защиты и автоматики, не должны требовать дополнительных оперативных переключений на месте (с выездом или вызовом оперативного персонала).
При примерно равноценных затратах и технико-экономических показателях предпочтение должно отдаваться автоматизации перед телеуправлением.
3.3.91. Телесигнализация должна предусматриваться:
Телесигнализация с электроустановок, которые находятся в оперативном управлении нескольких диспетчерских пунктов, как правило, должна передаваться на вышестоящий диспетчерский пункт путем ретрансляции или отбора с нижестоящего диспетчерского пункта. Система передачи информации, как правило, должна выполняться не более чем с одной ступенью ретрансляции.
Для телесигнализации состояния или положения оборудования электроустановок, как правило, должен использоваться в качестве датчика один вспомогательный контакт или контакт реле-повторителя.
3.3.92. Телеизмерения должны обеспечивать передачу основных электрических или технологических параметров (характеризующих режимы работы отдельных электроустановок), необходимых для установления и контроля оптимальных режимов работы всей системы энергоснабжения в целом, а также для предотвращения или ликвидации возможных аварийных процессов.
Телеизмерения наиболее важных параметров, а также параметров, необходимых для последующей ретрансляции, суммирования или регистрации, должны выполняться, как правило, непрерывными.
Система передачи телеизмерений на вышестоящие диспетчерские пункты, как правило, должна выполняться не более чем с одной ступенью ретрансляции.
Телеизмерения параметров, не требующих постоянного контроля, должны осуществляться периодически или по вызову.
При выполнении телеизмерений должны учитываться необходимость местного отсчета параметров на контролируемых пунктах. Измерительные преобразователи (датчики телеизмерений), обеспечивающие местный отсчет показаний, как правило, должны устанавливаться вместо щитовых приборов, если при этом сохраняется класс точности измерений (см. также гл. 1.6).
3.3.93. Объемы телемеханизации электроустановок, требования к устройствам телемеханики и каналам связи (тракт телепередачи) при использовании средств телемеханики для целей телерегулирования определяются в части точности, надежности и запаздывания информации проектом автоматического регулирования частоты и потоков мощности в объединенных энергосистемах. Телеизмерения параметров, необходимых для системы автоматического регулирования частоты и потоков мощности, должны выполняться непрерывными.
Тракт телепередачи, используемый для измерения потоков мощности, а также для передачи сигналов телерегулирования на основные или группу регулирующих электростанций, как правило, должен иметь дублированный канал телемеханики, состоящий из двух независимых каналов.
В устройствах телемеханики должны быть предусмотрены защиты, воздействующие на систему автоматического регулирования при различных повреждениях в устройствах или каналах телемеханики.
3.3.94. В каждом отдельном случае должна быть рассмотрена целесообразность совместного решения вопросов телемеханизации (особенно при выполнении каналов телемеханики и диспетчерских пунктов) в системах электро-, газо-, водо-, тепло- и воздухоснабжения и уличного освещения, контроля и управления производственными процессами.
3.3.95. Для крупных подстанций и электрических станций с большим числом генераторов и при значительных расстояниях от машинного зала, повысительной подстанции и других сооружений электростанции до центрального пункта управления при технической целесообразности необходимо предусматривать средства внутриобъектной телемеханизации. Объемы средств внутриобъектной телемеханизации должны выбираться в соответствии с требованиями технологического управления электростанций, а также с технико-экономическими показателями при конкретном проектировании.
3.3.96. При совместном применении различных систем телемеханики на одном диспетчерском пункте операции, производимые диспетчером, должны быть, как правило, одинаковыми.
3.3.97. При применении устройств телемеханики должна быть предусмотрена возможность отключения на месте:
3.3.98. Внешние связи устройств телемеханики должны выполняться в соответствии с требованиями гл. 3.4.
3.3.99. Электроизмерительные приборы-преобразователи (датчики телеизмерений), являясь стационарными электроизмерительными приборами, должны устанавливаться в соответствии с гл. 1.6.
3.3.100. В качестве каналов телемеханики могут быть использованы применяемые для других целей или самостоятельные проводные (кабельные и воздушные, уплотненные и неуплотненные) каналы, высокочастотные каналы по ВЛ и распределительной сети, радио и радиорелейные каналы связи.
Выбор способа организации каналов телемеханики, использование существующих или организация самостоятельных каналов, необходимость резервирования должны определяться технико-экономической целесообразностью и требуемой надежностью.
3.3.101. Для рационального использования аппаратуры телемеханики и каналов связи при обеспечении необходимой надежности и достоверности передачи информации допускается:
1. Телеизмерение мощности нескольких параллельных линий электропередачи одного напряжения выполнять как одно телеизмерение суммарной мощности.
2. Для телеизмерения по вызову на контролируемом пункте применять общие устройства для однородных измерений, а на диспетчерских пунктах — общие приборы для измерений, поступающих с разных контролируемых пунктов; при этом должна быть исключена возможность одновременной передачи или приема измерений.
3. Для сокращения объема телеизмерений рассматривать возможность замены их телесигнализацией предельных значений контролируемых параметров или устройствами сигнализации и регистрации отклонений параметров от установленной нормы.
4. Для одновременной передачи непрерывных телеизмерений и телесигнализации использовать комплексные устройства телемеханики.
5. Работа одного передающего устройства телемеханики на несколько диспетчерских пунктов, а также одного устройства телемеханики диспетчерского пункта на несколько контролируемых пунктов, в частности для сбора информации в городских и сельских распределительных сетях.
6. Ретрансляция на диспетчерский пункт предприятия электросетей с диспетчерских пунктов участков электрифицированных железных дорог телесигнализации и телеизмерений с тяговых подстанций.
3.3.102. Питание устройств телемеханики (как основное, так и резервное) на диспетчерских и контролируемых пунктах должно осуществляться совместно с питанием аппаратуры каналов связи и телемеханики.
Резервное питание устройств телемеханики на контролируемых пунктах с оперативным переменным током должно предусматриваться при наличии источников резервирования (другие секции систем шин, резервные вводы, аккумуляторные батареи устройств каналов связи, трансформаторы напряжения на вводах, отбор от конденсаторов связи и т. п.). Если резервные источники питания для каких-либо других целей не предусматриваются, то резервирование питания устройств телемеханики, как правило, не должно предусматриваться. Резервное питание устройств телемеханики на контролируемых пунктах, имеющих аккумуляторные батареи оперативного тока, должно осуществляться через преобразователи. Резервное питание устройств телемеханики, установленных на диспетчерских пунктах объединенных энергосистем и предприятий электросетей, должно осуществляться от независимых источников (аккумуляторной батареи с преобразователями постоянного тока в переменный, двигателя-генератора внутреннего сгорания) совместно с устройствами каналов связи и телемеханики.
Переход на работу от источников резервного питания при нарушении электроснабжения основных источников должен быть автоматизирован. Необходимость резервирования питания на диспетчерских пунктах промышленных предприятий должна определяться в зависимости от требований по обеспечению надежности энергоснабжения.
3.3.103. Вся аппаратура и панели телемеханики должны иметь маркировку и устанавливаться в местах, удобных для эксплуатации.